SLAM Visual: Navegación robótica a partir de imágenes
Compartir

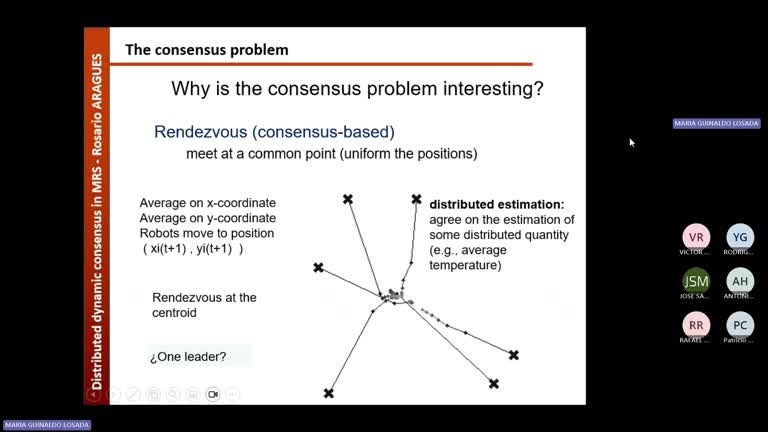
Uno de los principales objetivos de la robótica móvil consiste en poder realizar diversos trabajos y tareas mediante desplazamientos en espacios no conocidos a priori. Para poder acometer tareas de navegación de forma precisa, es imprescindible disponer de un mapa del entorno con objeto de que los robots puedan localizarse en todo momento dentro de este mapa y de esta forma planificar nuevos movimientos. En entornos estáticos y conocidos este mapa del entorno puede encontrarse perfectamente identificado a priori. Sin embargo en entornos fuertemente dinámicos o bien desconocidos, surge la necesidad de que el robot móvil realice una construcción del entorno (mapa) por el que se desenvuelve a la vez que se localiza dentro de ese mismo mapa en construcción. Este proceso es conocido como SLAM (Simultaneous Localization And Mapping). Durante los últimos años multitud de investigadores de todo el mundo han dedicado fuertes esfuerzos en acometer de múltiples formas posibles este problema que aún se encuentra sin resolver. El reconocimiento del entorno para la creación del mapa puede realizarse con diferentes tipos de sensores que porte el robot móvil en su movimiento: infrarrojos, laser, sistemas de visión, etc. Los sistemas de visión embarcados son hoy en día muy empleados dado que además de su bajo coste, ofrecen multitud de características e información visual que pueden ser utilizadas en tareas de alto nivel. Tomando como base la información visual aportada por los sistemas de visión, se pueden acometer diferentes alternativas para resolver el problema de SLAM utilizando este tipo de sensores. En cuanto al procedimiento empleado para el proceso de SLAM, podemos encontrarnos con métodos estadísticos basados en diferentes filtros (Kalman, Rao-Blackwellized, etc.), o procesos que trabajan en paralelo con objeto de reducir de forma paulatina tanto los errores en la localización del robot móvil como en la construcción del mapa. En este sentido en la charla se ofrecerá una revisión de las diferentes alternativas empleadas hasta el momento para resolver este problema tan crítico en el desarrollo de tareas por parte de robots móviles en entornos desconocidos.
-
Oscar Reinoso García catedrático de Universidad, Universidad Miguel Hernández