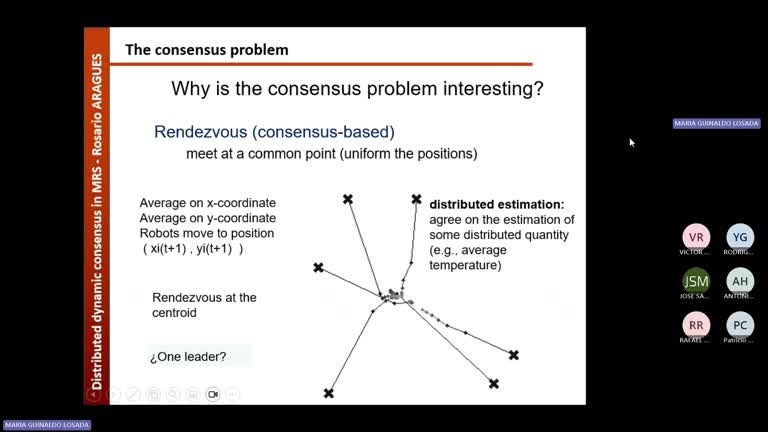
Distributed dynamic consensus in multi robot systems
El siglo de los Escipiones
Geografía e Historia en Radio 3
Presentación del Curso 1998-99
Ingeniería en Radio 3
Orientaciónes del Curso. Organización de las prácticas. Programación de radio.
Orientaciones del Departamento de Ingeniería de Construcción y Fabricación
Orientaciones de la asignatura Química I y orientaciones del Departamento de Ingeniería de Construcción y Fabricación
El Departamento de Química Aplicada a la Ingeniería
Algebra Lineal. Química Aplicada a la Ingeniería
Orientaciones Cálculo Infinitesimal. Aspectos administrativos de la ETSII
Física 1º Curso. La Delegación de alumnos de la ETSII
El Departamento de Matemáticas Aplicadas
Orientaciones Química II. Departamento de Matemática Aplicada
Orientaciones de Ingeniería Eléctrica, Electrónica y de Control
Técnicas de Representación y Dibujo. Orientaciones de Ingeniería Eléctrica, Electrónica y de Control
Departamento de Mecánica
Ampliación de Calculo. Departamento de Mecánica
Departamento de Técnicas Energéticas
Departamento de Técnicas Energéticas. Felicitación de navidad de la ETSII
Teoría de Circuitos
Química II
Estructuras y cálculo por elementos finitos
La fusión como fuente de energía
Ciclo de Conferencias del Máster y del Programa y Doctorado en Ingeniería de Sistemas y de Control
Control automático en el nexo agua-energía-alimentación
IA Generativa en Producción: Industria 5.0, IA Centrada en Datos y Marco Regulatorio Europeo
Avances en enfoques de control óptimo y predictivo para la mejora de sistemas solares térmicos
Emergencia y transferencia de comunicación semántica en robótica colectiva
Intelligent systems for anomaly detection of real cases for production optimizing
Control en red para seguimiento de trayectorias en vehículos autónomos con eficiencia de recursos
La función descriptiva: Una técnica clásica de control de gran interés práctico
Controladores PID: principios y ajuste experimental
Sintonía de controladores PID basados en eventos por cruce de umbrales fijos. Un enfoque desde la teoría clásica de control automático
URpilot: Una controladora de vuelo flexible para UAV de ámbito profesional
Evolución y desafíos del modelado y simulación orientados a objetos
Una introducción al control basado en datos con procesos de regresión
Uso de vehículos autónomos marinos en la monitorización de la calidad de las aguas embalsadas
Páncreas artificial: avances y desafíos del control de glucosa en lazo cerrado en diabetes tipo 1
Sistemas de control reseteado: fundamentos y aplicaciones
Avances en técnicas de control y optimización en desalación de agua utilizando energía solar y ejemplos de aplicación
Gestión Inteligente de la desalación con el objetivo de maximizar la integración de energías renovables en islas
Unibotics: plataforma web de programación de robots en ingeniería